
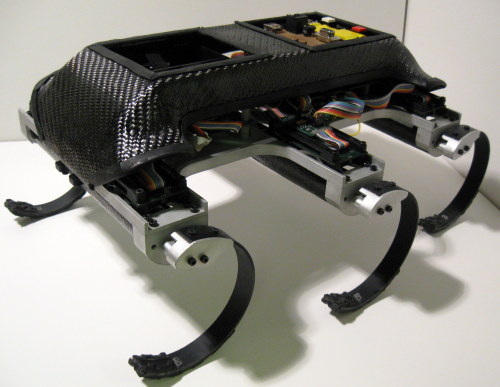
Muita complexidade está relacionada ao nosso modo de andar. Uma coisa considerada simples, é na verdade envolvida de milhares de informações a serem processadas, tais como características sobre o terreno, a carga que carregamos e a velocidade que desejamos desenvolver. Tudo isso é enviado às nossas pernas e transformado em decisões sobre a nossa postura e a rigidez dos nossos músculos. Como sabemos, os robôs são notoriamente ineficazes ao se tratar de modificações adaptativas, estando geralmente engessados a estruturas pré definidas. Mas isso está mudando, o EduBot, desenvolvido pelo Kod*lab, da universidade da Penssylvania, é um robô hexapode, ou seja, possui 6 pernas, e é capaz de captar informações sobre a dureza do terreno, relacioná-las à sua carga e a velocidade desejada e então adaptar suas pernas a uma posição e elasticidade adequadas, assim como uma forma de andar adaptada à situação. Algumas experiências podem ser vistas no vídeo à seguir:
A adição de tomadas de decisão que afetam a própria estrutura física do robô é um recurso que torna viável milhares de aplicações, inclusive médicas, tais como o desenvolvimento de próteses e outros recursos de robótica aplicada à saúde humana. Apesar da complexidade adicionada ao software de tomada de decisão e ao próprio hardware, são pesquisas que apontam para o real futuro da humanidade, onde máquinas poderão desenvolver até as mais complexas e delicadas atividades, tal a sua capacidade de reproduzir nossa enorme capacidade adaptativa.
Site oficial do EduBot: http://kodlab.seas.upenn.edu/RHex/EduBot
Nenhum comentário:
Postar um comentário